今天读了一下《地理坐标(经纬度坐标)和屏幕坐标(xy坐标)间的转换》,觉得内容很好,特摘录和附上自己的解释。
背景
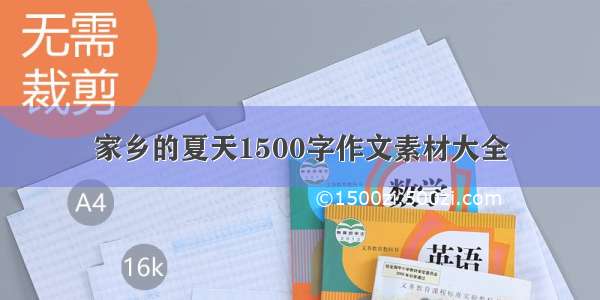
在我们的屏幕上,有一张地图,这张地图经过缩放、平移、旋转,最终地理坐标和屏幕坐标的关系大致如下图所示:
这种关系要怎么描述呢?我们可以假设地图是一张纸,而屏幕是一堵墙。只要我们有两个图钉,我们就能把纸定在墙上。我们把这两个点称为锚点。锚点在屏幕坐标系上的坐标是(x1,y1)和(x2,y2),对应在地理坐标系上的坐标是(lon1,lat1)和(lon2,lat2)。
那现在的问题就变成了,已知两个锚点的坐标,
(1)地理坐标转屏幕坐标:已知任意一点的地理坐标(lon,lat),求它在屏幕上的坐标(x,y)
(2)屏幕坐标转地理坐标:已知任意一点的屏幕坐标(x,y),求它的经纬度坐标(lon,lat)
lon 表示 longitude (纬度)lat 表示 latitude (经度)x,y 表示屏幕上的只是一个任意位置的坐标点
转换算法
1、铺垫内容-地理坐标平面化
在一个小范围内(例如是方圆几公里内),我们可以假设地面是平的,而不是弯的。如果经纬度都用弧度表示,那么1纬度方向对应的长度是:
1 纬 度 方 向 长 度 = R ⋅ l a t 1 纬度方向长度 = R \cdot lat 1纬度方向长度=R⋅lat
注意:此处的 lat 指的不是我们常用的纬度度数,而是纬度弧度。半径乘以弧度才能得到弧长!
度 数 360 = 弧 度 2 π \frac{度数}{360}=\frac{弧度}{2π} 360度数=2π弧度
故 弧度 = 度数 ⋅ π 180 \cdot \frac{ \pi }{180} ⋅180π
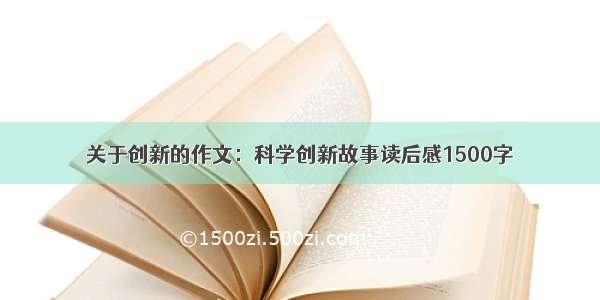
其中 R R R 是地球半径。 而相同经度间的距离会随着纬度的增加而减少,
在 l a t lat lat 这一纬度下,1经度方向对应的长度是:
1 经 度 方 向 长 度 = R ⋅ cos ( l a t ) ⋅ l o n 1 经度方向长度= R \cdot \cos{(lat)} \cdot lon 1经度方向长度=R⋅cos(lat)⋅lon
上式中的 R ⋅ cos ( l a t ) R \cdot \cos{(lat )} R⋅cos(lat) 就是上图中的某一纬度下的切面的半径,然后在半径乘以弧度。
那么,(lon,lat)这个坐标平面化后的坐标就是: ( R ⋅ l o n ⋅ cos ( l a t ) , R ⋅ l a t ) (R \cdot lon \cdot \cos{(lat)},R \cdot lat) (R⋅lon⋅cos(lat),R⋅lat)
故,此坐标可以作为我们在某一个小的平面范围内的类似于x、y的坐标
由于我们是假定在小范围内纬度是不变的,故此时若我们有两个经度不同的点,求经度长度的差时,应该遵循:
d l e n l o n = R ⋅ l o n 2 ⋅ c o s ( l a t ) − R ⋅ l o n 1 ⋅ c o s ( l a t ) = R ( l o n 2 − l o n 1 ) ⋅ c o s ( l a t ) dlen_{lon} = R \cdot lon_2 \cdot cos (lat) - R \cdot lon_1 \cdot cos (lat) = R(lon_2 - lon_1 )\cdot cos (lat) dlenlon=R⋅lon2⋅cos(lat)−R⋅lon1⋅cos(lat)=R(lon2−lon1)⋅cos(lat)
其实上式中的求纬度长度差时用到的 l a t lat lat,使用 l a t 1 lat_1 lat1或者是 l a t 2 lat_2 lat2都对,因为我们在计算经度长度时视作一致。
如果求一个纬度长度差与经度长度差比值的话:
d l e n l a t d l e n l o n = R ⋅ l a t 2 − R ⋅ l a t 1 R ( l o n 2 − l o n 1 ) ⋅ c o s ( l a t ) \frac{dlen_{lat}}{dlen_{lon}} = \frac{R \cdot lat_2-R \cdot lat_1}{R(lon_2 - lon_1 )\cdot cos (lat)} dlenlondlenlat=R(lon2−lon1)⋅cos(lat)R⋅lat2−R⋅lat1
好,我们上下同时除以 R R R,可得
= l a t 2 − l a t 1 ( l o n 2 − l o n 1 ) ⋅ c o s ( l a t ) = \frac{lat_2- lat_1}{(lon_2 - lon_1 )\cdot cos (lat)} =(lon2−lon1)⋅cos(lat)lat2−lat1
又因为前面提到过,我们计算经度长度时视纬度为不变的,故我们随意地,把 l a t 2 lat_2 lat2 代给 l a t lat lat .
= l a t 2 − l a t 1 ( l o n 2 − l o n 1 ) ⋅ c o s ( l a t 2 ) = \frac{lat_2- lat_1}{(lon_2 - lon_1 )\cdot cos (lat_2)} =(lon2−lon1)⋅cos(lat2)lat2−lat1
这里需要注意的是: l a t 2 − l a t 1 ( l o n 2 − l o n 1 ) \frac{lat_2- lat_1}{(lon_2 - lon_1 )} (lon2−lon1)lat2−lat1 是个比值,故用度数比和弧度比都一致。但是, c o s ( l a t 2 ) cos (lat_2) cos(lat2) 处只能是弧度,原文的代码中有特别指出。
此二者的比值可以方便我们:
在得到经度时根据比值关系获得纬度
或
在得到纬度时根据比值关系获得经度
换到解方程组里就是y通过某种关系变成了能用x表示的式子,方程中只剩下一个未知数后,便可以求解。此刻,我们已经得到经纬度的代数关系,下面就是去根据向量法来把问题拉回到一个点上的经纬度以及xy之间的关系。
2、核心内容-向量法
由已知点和未知点组成两组向量:
由于坐标系转换是线性变换,所以两组向量有以下特性:
(1)两向量在不同的坐标系中的长度比是相同的。
(2)两向量在不同的坐标系中的夹角是相同的。
根据上面两个特性,我们可列出方程组:
下面提到的 d ,应该只是简单代指 difference (差值)
设向量1为 ( d x 1 , d y 1 ) (dx_1,dy_1) (dx1,dy1), ( d l o n 1 , d l a t 1 ) (dlon_1,dlat_1) (dlon1,dlat1),向量2为 ( d x 2 , d y 2 ) , ( d l o n 2 , d l a t 2 ) (dx_2,dy_2),(dlon_2,dlat_2) (dx2,dy2),(dlon2,dlat2),
由于把经度长度差写成 d l e n l o n dlen_{lon} dlenlon 把纬度长度差写成 d l e n l a t dlen_{lat} dlenlat 比较麻烦,这里简写成了 d l o n dlon dlon 和 d l a t dlat dlat 因为长度嘛,只能是线段长、弧长的比,不可能是直接的度数比。这里适应一下,提醒一下自己。
其中
d x 1 = x 2 − x 1 dx_1=x_2-x_1 dx1=x2−x1, d y 1 = y 2 − y 1 dy_1=y_2-y_1 dy1=y2−y1, d l o n 1 = l o n 2 − l o n 1 dlon_1=lon_2-lon_1 dlon1=lon2−lon1, d l a t 1 = l a t 2 − l a t 1 dlat_1=lat_2-lat_1 dlat1=lat2−lat1
d x 2 = x − x 1 dx_2=x-x_1 dx2=x−x1 , d y 2 = y − y 1 dy_2=y-y_1 dy2=y−y1 , d l o n 2 = l o n − l o n 1 dlon_2=lon-lon_1 dlon2=lon−lon1, d l a t 2 = l a t − l a t 1 dlat_2=lat-lat_1 dlat2=lat−lat1,
然后
k 1 = n o r m ( d x 1 , d y 1 ) k_1=norm(dx_1,dy_1) k1=norm(dx1,dy1)
k 2 = n o r m ( d l o n 1 , d l a t 1 ) k_2=norm(dlon_1,dlat_1) k2=norm(dlon1,dlat1)
k 3 = n o r m ( d x 2 , d y 2 ) k_3=norm(dx_2,dy_2) k3=norm(dx2,dy2)
k 4 = n o r m ( d l o n 2 , d l a t 2 ) k_4=norm(dlon_2,dlat_2) k4=norm(dlon2,dlat2)
这里的
norm函数我查了一下,就是求范数,根据《np.linalg.norm(求范数)》 一文的介绍,向量的范数有计算公式,默认是求二范数,二范数就是向量的模长。
下面我们给出方程组:
根据前文中提到的两向量在不同的坐标系中的长度比是相同的可得到
k 1 k 2 = k 3 k 4 \frac{k_1}{k_2} = \frac{k_3}{k_4} k2k1=k4k3
本式当然可以写成:
d x 1 2 + d y 1 2 d l o n 1 2 + d l a t 1 2 = d x 2 2 + d y 2 2 d l o n 2 2 + d l a t 2 2 \frac{\sqrt{dx_1^2 + dy_1^2}}{\sqrt{dlon_1^2+dlat_1^2}} = \frac{\sqrt{dx_2^2 + dy_2^2}}{\sqrt{dlon_2^2+dlat_2^2}} dlon12+dlat12 dx12+dy12 =dlon22+dlat22 dx22+dy22
根据前文中提到的两向量在不同的坐标系中的夹角是相同的
我们可得出以下四个式子:
① d x 1 k 1 = d x 2 k 3 ( 通 过 x 求 夹 角 c o s 值 ) ① \frac{dx_1}{k_1} = \frac{dx_2}{k_3} (通过x求夹角 cos 值) ①k1dx1=k3dx2(通过x求夹角cos值)
② d y 1 k 1 = d y 2 k 3 ( 通 过 y 求 夹 角 s i n 值 ) ② \frac{dy_1}{k_1} = \frac{dy_2}{k_3} (通过y求夹角 sin 值) ②k1dy1=k3dy2(通过y求夹角sin值)
③ d l o n 1 k 2 = d l o n 2 k 4 ( 通 过 经 度 求 夹 角 c o s 值 ) ③ \frac{dlon_1}{k_2} = \frac{dlon_2}{k_4} (通过经度求夹角 cos 值) ③k2dlon1=k4dlon2(通过经度求夹角cos值)
④ d l a t 1 k 2 = d l a t 2 k 4 ( 通 过 纬 度 求 夹 角 s i n 值 ) ④ \frac{dlat_1}{k_2} = \frac{dlat_2}{k_4} (通过纬度求夹角 sin 值) ④k2dlat1=k4dlat2(通过纬度求夹角sin值)
由 ① 乘以 ③ 可得:
⑤ d x 1 ⋅ d l o n 1 k 1 ⋅ k 2 = d x 2 ⋅ d l o n 2 k 3 ⋅ k 4 ⑤ \frac{dx_1 \cdot dlon_1 }{k1 \cdot k_2} = \frac{dx_2 \cdot dlon_2}{k_3 \cdot k_4} ⑤k1⋅k2dx1⋅dlon1=k3⋅k4dx2⋅dlon2
由 ② 乘以 ④ 可得:
⑥ d y 1 ⋅ d l a t 1 k 1 ⋅ k 2 = d y 2 ⋅ d l a t 2 k 3 ⋅ k 4 ⑥ \frac{dy_1 \cdot dlat_1 }{k1 \cdot k_2} = \frac{dy_2 \cdot dlat_2}{k_3 \cdot k_4} ⑥k1⋅k2dy1⋅dlat1=k3⋅k4dy2⋅dlat2
将 ⑤ 与 ⑥ 相加,即可得原文中提到的复合在一起的式子:
d x 1 ⋅ d l o n 1 + d y 1 ⋅ d l a t 1 k 1 ⋅ k 2 = d x 2 ⋅ d l o n 2 + d y 2 ⋅ d l a t 2 k 3 ⋅ k 4 \frac{dx_1 \cdot dlon_1 + dy_1 \cdot dlat_1 }{k1 \cdot k_2} = \frac{dx_2 \cdot dlon_2 + dy_2 \cdot dlat_2}{k_3 \cdot k_4} k1⋅k2dx1⋅dlon1+dy1⋅dlat1=k3⋅k4dx2⋅dlon2+dy2⋅dlat2
故最后的方程组为:
{ k 1 k 2 = k 3 k 4 d x 1 ⋅ d l o n 1 + d y 1 ⋅ d l a t 1 k 1 ⋅ k 2 = d x 2 ⋅ d l o n 2 + d y 2 ⋅ d l a t 2 k 3 ⋅ k 4 \begin{array}{l} \left\{\begin{matrix} \frac{k_1}{k_2} = \frac{k_3}{k_4} \\ \frac{dx_1 \cdot dlon_1 + dy_1 \cdot dlat_1 }{k1 \cdot k_2} = \frac{dx_2 \cdot dlon_2 + dy_2 \cdot dlat_2}{k_3 \cdot k_4} \end{matrix}\right. \end{array} {k2k1=k4k3k1⋅k2dx1⋅dlon1+dy1⋅dlat1=k3⋅k4dx2⋅dlon2+dy2⋅dlat2
我再贴张用LaTeX公式编辑器绘制出的大图:
通过解上面的方程组,我们就能得到未知的屏幕坐标或未知的地理坐标。
为什么呢?别看推导过程中代数符号(变量名)很多,其实不确定的值只有:
( x , y ) 和 ( l o n , l a t ) (x,y)和(lon,lat) (x,y)和(lon,lat)
故,接下来就简单了:
将 ( x , y ) (x,y) (x,y)带入方程组就可以得到 ( l o n , l a t ) (lon,lat) (lon,lat)
反过来,将 ( l o n , l a t ) (lon,lat) (lon,lat)带入方程组就可以得到 ( x , y ) (x,y) (x,y)
这里需要注意的是:
处于分母位置的 k 1 k_1 k1、 k 2 k_2 k2、 k 3 k_3 k3、 k 4 k_4 k4 都不能为零
转换为编程中的除零异常就是需要注意的是:
参考的两点不能完全相等进行计算的 ( x , y ) (x,y) (x,y)或 ( l o n , l a t ) (lon,lat) (lon,lat)不能与第一个参考点相同
对于第二句话,由于类库使用者调用本函数时,不会注意传参顺序,故你可要求他要计算的点不应该为两个参考点中任意一个。
实际工程中,对于这个问题,我们判断一下 d x 1 , d y 1 dx_1,dy_1 dx1,dy1 ,即当前点是否和参考点重合,如果重合,直接返回参考点。
屏幕坐标转地理坐标(Java实现)
由于原文中已给出了详尽的C#代码,这里我只给出自己的关于屏幕坐标转地理坐标的Java实现。由于代码实现解方程组我还不熟悉,只能按照原有文章中的代码逻辑直接给出到大家,待后续有能力了,我会把变量都和代数中的符号保持一致。
1.首先定义包含 ( x , y ) (x,y) (x,y) 和 ( l o n , l a t ) (lon,lat) (lon,lat) 的数据存储的类
public class XYLonLatModle {private double x;private double y;private double longitude;private double latitude;public double getX() {return x;}public void setX(double x) {this.x = x;}public double getY() {return y;}public void setY(double y) {this.y = y;}public double getLongitude() {return longitude;}public void setLongitude(double longitude) {this.longitude = longitude;}public double getLatitude() {return latitude;}public void setLatitude(double latitude) {this.latitude = latitude;}public String getWgsString() {return latitude + "," + longitude;}}
然后为了构建这个XYLonLatModle更加方便,我们再写一个Builder类。
public final class XYLonLatModleBuilder {private double x;private double y;private double longitude;private double latitude;private XYLonLatModleBuilder() {}public static XYLonLatModleBuilder aXYLonLatModle() {return new XYLonLatModleBuilder();}public XYLonLatModleBuilder withX(double x) {this.x = x;return this;}public XYLonLatModleBuilder withY(double y) {this.y = y;return this;}public XYLonLatModleBuilder withOriginalXY() {this.x = 0;this.y = 0;return this;}public XYLonLatModleBuilder withXyString(String xyString){String[] strings = xyString.split(",");this.x = Double.parseDouble(strings[0]);this.y = Double.parseDouble(strings[1]);return this;}public XYLonLatModleBuilder withLongitude(double longitude) {this.longitude = longitude;return this;}public XYLonLatModleBuilder withLatitude(double latitude) {this.latitude = latitude;return this;}public XYLonLatModleBuilder withLatitudeLongitudeString(String latLngString) {String[] strings = latLngString.split(",");this.latitude = Double.parseDouble(strings[0]);this.longitude = Double.parseDouble(strings[1]);return this;}public XYLonLatModle build() {XYLonLatModle xYLonLatModle = new XYLonLatModle();xYLonLatModle.setX(x);xYLonLatModle.setY(y);xYLonLatModle.setLongitude(longitude);xYLonLatModle.setLatitude(latitude);return xYLonLatModle;}}
2.创建工具类根据两个参照点和当前的 ( x , y ) (x,y) (x,y) 计算 ( l o n , l a t ) (lon,lat) (lon,lat)
public class XYLongitudeLatitudeConvertUtil {public static double norm(double a, double b) {return Math.sqrt(a * a + b * b);}/*** x y 坐标转 经纬度** @param x* @param y* @param reference1* @param reference2* @return*/public static XYLonLatModle vectorMapXyToLatLng(double x, double y, XYLonLatModle reference1, XYLonLatModle reference2) {double x1 = reference1.getX();double y1 = reference1.getY();double lon1 = reference1.getLongitude();double lat1 = reference1.getLatitude();double x2 = reference2.getX();double y2 = reference2.getY();double lon2 = reference2.getLongitude();double lat2 = reference2.getLatitude();double lon_cos = Math.cos(lat2 * Math.PI / 180);double m = (lon2 - lon1) * lon_cos;double n = (lat2 - lat1);double dx1 = x2 - x1;double dy1 = y2 - y1;double dx2 = x - x1;double dy2 = y - y1;double a = (dx2 * dx2 + dy2 * dy2) * (m * m + n * n) / (dx1 * dx1 + dy1 * dy1);double norm = norm(m, n);double v = dx1 * dx2 + dy2 * dy1;double sqrt = Math.sqrt(a);double b = v * norm * sqrt / (norm(dx1, dy1) * norm(dx2, dy2));double c = Math.sqrt(b * b * n * n - (m * m + n * n) * (b * b - a * m * m));double q1 = (b * n + c) / (m * m + n * n);double q2 = (b * n - c) / (m * m + n * n);double p1 = (b - q1 * n) / m;double p2 = (b - q2 * n) / m;double lon_1 = p1 / lon_cos + lon1;double lat_1 = q1 + lat1;double lon_2 = p2 / lon_cos + lon1;double lat_2 = q2 + lat1;double judge1 = (lon_1 - lon1) * (lat2 - lat1) - (lat_1 - lat1) * (lon2 - lon1);double judge2 = (lon_2 - lon1) * (lat2 - lat1) - (lat_2 - lat1) * (lon2 - lon1);double judge = (x - x1) * (y2 - y1) - (y - y1) * (x2 - x1);double lon = 0;double lat = 0;if (judge * judge1 < 0) {lon = lon_1;lat = lat_1;} else {lon = lon_2;lat = lat_2;}XYLonLatModle xyLonLatModle = XYLonLatModleBuilder.aXYLonLatModle().withX(x).withY(y).withLongitude(lon).withLatitude(lat).build();return xyLonLatModle;}}
本方法未用到任何jar包依赖,直接使用的Java基本语法,故不需要给出import
最简易的调用就是用屏幕中的零点和一个较大的点来作参考:
XYLonLatModle originalPoint = XYLonLatModleBuilder.aXYLonLatModle().withOriginalXY().withLatitudeLongitudeString("20.156,52.369").build();XYLonLatModle anotherPoint = XYLonLatModleBuilder.aXYLonLatModle().withXyString("5,5").withLatitudeLongitudeString("20.157,52.370").build();XYLonLatModle xyLonLatModle = XYLongitudeLatitudeConvertUtil.vectorMapXyToLatLng(x, y, originalPoint, anotherPoint);



![[推荐]中国达人秀:刘伟的1500字作文](https://1500zi.500zi.com/uploadfile/img/2024/08/28/d8eef0d8c8c197a59e7d5cc3ca1e9f0f.jpg)